Keywords
협동 로봇의 고장 진단을 수행하기위한 데이터 요구사항 도출
블랙박스 설계
1~3레벨 수준 정보 제공
1. 서론
- 스마트 팩토리는 설비 기기에 대한 결함, 비정상, 고장에 대해 정확히 예측하는 것이 필수
- 이를 위한 예지보전 ( predictive maintenance ) 기술을 적용중
- 그중에서도 상태기반 유지보수( Condition-Based Maintenance ) 가 대표적인 방법
* 상태기반 유지보수 : 기기의 상태를 파악하고 예측하는 방식으로 손상이나 고장이 감지된 경우에만 시행
- 협동로봇의 데이터 생성의 특성
1) 협동로봇의 각 관절 별로 상태 정보가 구분되어 생성 필요
2) 협동로봇의 괒널에 내장된 센서를 고려한 구조적이고 통합된 형태의 데이터 모델이 필요
3) 물리 신호 데이터에 대한 주기적인 센싱 방식 및 필요, 수행된 작업 정보에 대한 로그 데이터 생성이 필요하며,
센서 데이터와 해당부분의 로그데이터가 함께 분석 될 수 있어야함
2. 관련 연구
2.1 상태 기반 유지보수를 통한 예지보전 기술
1) 모델 중심 접근법 : 물리적인 고장 메커니즘에 관한 해석 기반의 손상 모델을 통해 상태파악
2) 데이터 중심 접근법 : 데이터의 통계적 특성을 이용하여 정상과 고장 구분
2.2 데이터 기반로봇 고장 진단 기술

3. 협동 로봇의 고장 진단 관점 데이터 요구사항 도출
3.1 시나리오 기반 예지보전 관점 요구사항 도출
- 제조과정을 이용하여 제조 시나리오 설계
- 5가지 종류의 디바이스 사용, 26개의 작업 발생을 기반으로 요구사항 도출

3.2 데이터 생명주기 기반 요구사항 도출
: 데이터 생명 주기를 기반으로 도출
* 데이터 생명주기 : 생성 > 정제 > 분석 > 활용 > 소멸
• 생성: 디바이스에서 데이터가 생성되는 과정
• 정제: 생성된 데이터를 분석할 수 있는 형태로 규격화 하는 과정
• 분석: 생성된 데이터를 분석할 수 있는 형태로 규격화 하는 과정
• 활용: 생성된 데이터를 분석할 수 있는 형태로 규격화 하는 과정
• 소멸: 생성된 로그 데이터를 분석할 수 있는 형태로 규격화 하는 과정
4. 요구사항 기반 협동 로봇 블랙박스 설계
4.1 협동 로봇 블랙박스 정의
블랙박스 : 협동 로봇에서 고장 진단을 위해 관찰된 데이터가 통합 생성 및 수집되는 소프트웨어
구성 : • 가동 정보(O) 생성 모듈: 협동 로봇의 전원, 작업 프로그램, 동작 명령어 정보를 생성
• 상태 정보(S) 생성 모듈: 협동 로봇의 동작에 의한 상태 정보 및 상태 전이 정보를 생성
• 통신 정보(C) 생성 모듈: 협동 로봇과 서버 혹은 다른 기기와의 통신 상태를 생성
• 물리 정보(P) 생성 모듈: 협동 로봇에 내장된 센서로부터 물리 신호 정보를 생성
• 고장 정보(F) 생성 모듈: 협동 로봇의 고장 및 결함 정보를 생성
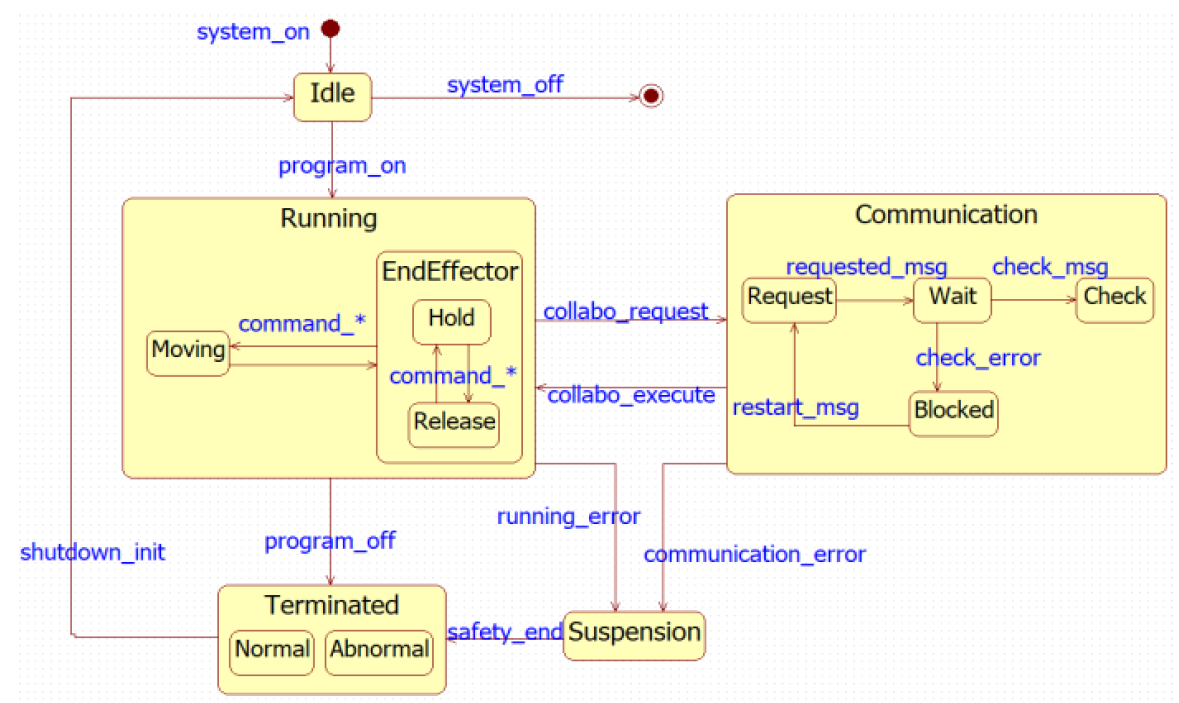
4.2 협동 로봇 의 상태 및 동작 모델링
상태의 종류 : 대기상태, 작업 수행상태, 수행종료상태(중단종료상태/정상종료상태/비정상종료상태), 통신상태
4.3 협동 로봇 고장 진단 데이터 모델 설계
데이터 생성체계 : 센서 데이터 생성 / 이벤트 로그 생성 으로 구분
4.3.1 센서 데이터 모델 설계
: 주기, 데이터로 분류되는 형태의 통합 센서 데이터 모델
- 주기 : 로그발생 기준 절대시각
- 데이터 : 센서 타입/어느관절/물리신호값
4.3.2 이벤트 로그 데이터 모델 설계
: 가동, 상태, 통신, 고장정보 생성 필요
- 날짜 : 로그발생기준
- 레벨 : 상태 및 전이 정보(INFO), 비정상 (WARN), 고장 (FAULT), 협동로봇의 동작 및 통신 오류 정보 (DEBUG)
- 그룹 : 하드웨어 모듈 (MACHINE), 통신모듈 (FRAMEWORK), 제어모듈 (CONTROLLER), 고장 진단 (DETECTOR)
- 주기 : 로그발생 기준 절대시각
- 메시지 : Identifier과 note로 구성된 문자열 ex) #boot, #event ...
5. 구현 및 평가
5.1 블랙박스 구현
개발환경 : python 3.7, 6축 협력 로봇 Niryo One, 라즈베리파이3B+
추출 data : 위치 데이터 (x, y, z, roll, pitch, yaw), 축의 각도( radian ), 온도, 모터 인가 전류, 10ms 단위 시계열 data
추출형식 : XML > DB


5.2 데이터 생성 결과 분석
1) 1레벨 수준 ( 물리 신호 정보 )
: 시계열로 정렬된 데이터로 예측 모델 개발 But 작업에 따라 상이한 패턴 So, 한계
2) 2레벨 수준 ( 1)+ 가동/상태/통신정보 )
: 세부적인 데이터 분석 가능 → 동일한 작업의 경우 비슷한 수준의 전류 값을 생성, 일관된 패턴 확인 가능
3) 3레벨 수준 ( 2)+고장 정보 )
: 오류 발생상황 파악 및 이벤트 로그 데이터( 상태정보 ) 분석하여 의미 해석 가능
6. 결론 및 향후 연구
1) 블랙박스 제안
2) 스마트 팩토리의 제조 시나리오 및 데이터 생명 주기에 따른 데이터 요구사항 도출
3) 상위의 항목을 반영하여 구현
'공부 서랍장 > 논문' 카테고리의 다른 글
| [논문리뷰-의료] An Assisted Diagnosis System for Detection of Early Pulmonary Nodule in Computed Tomography Images (0) | 2021.01.11 |
|---|---|
| [의료] Pulmonary nodule 2 (0) | 2021.01.10 |
| [논문] 영문논문 쉽게 번역기 돌리는 꿀팁 (3) | 2021.01.10 |
| [의료] Pulmonary nodule 1 (0) | 2021.01.09 |
| [논문리뷰-로봇]Fault Prediction by identifying programmable motions for predictive maintenance of a collaborative robot (0) | 2021.01.08 |